Andrew Cooke | Contents | RSS | Previous
Welcome to my blog, which was once a mailing list of the same name and is still generated by mail. Please reply via the "comment" links.
Always interested in offers/projects/new ideas. Eclectic experience in fields like: numerical computing; Python web; Java enterprise; functional languages; GPGPU; SQL databases; etc. Based in Santiago, Chile; telecommute worldwide. CV; email.
Choochoo Training Diary
Fast integer <-> float conversion
Hello World on Music Thing Modular (from Linux)
Reddit Comment on Fascism + Trump
[Computing] Efficient queries with grouping in Postgres
[Computing] Automatic Wake (Linux)
[Computing] AWS CDK Aspects in Go
[Computing, Horror] Biological Chips
[Physics] Quantum Transitions are not Instantaneous
[Computing] AI and Drum Machines
[Computing] Probabilities, Stopping Times, Martingales
[Computing] Starlab Systems - Linux Laptops
[Computing] Extended Berkeley Packet Filter
[Green] Mainspring Linear Generator
Immediate attention needed for your account [ Ticket no: 91833294697018 ]
Applebaum - Twilight of Democracy
You can Masquerade in Firewalld
Update - Garmin Express / Connect
© 2006-2025 Andrew Cooke (site) / post authors (content).
From: andrew cooke <andrew@...>
Date: Thu, 10 Jul 2025 20:02:51 -0400
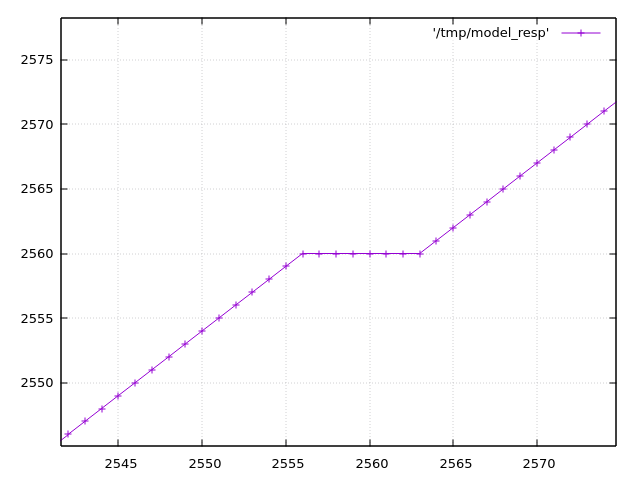
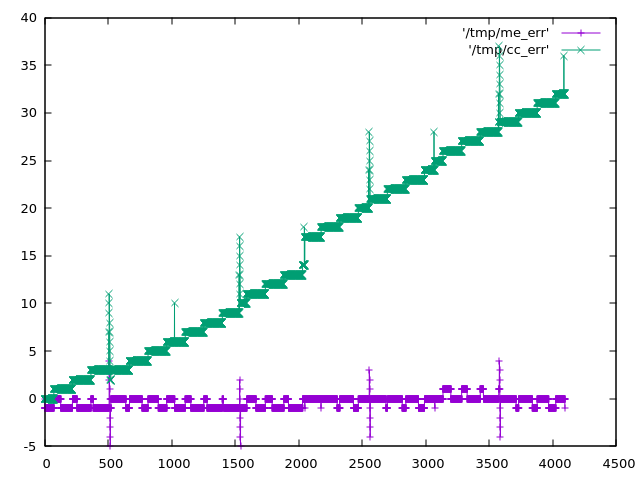
The Raspberry Pico 2024 has a problem with the ADC. It's described in https://datasheets.raspberrypi.com/rp2040/rp2040-datasheet.pdf (see section 4.9.4 and the worrying low ENOB just before). The DNL and INL in that datasheet are explained at https://www.allaboutcircuits.com/technical-articles/understanding-analog-to-digital-converter-differential-nonlinearity-dnl-error/ If I've understood correctly that means that there are a few places where the ADC output "sticks" at a particular input value instead of incrementing. As the input continues to rise, after it has "missed" 8 or so bits, it "unsticks" and continues increasing from where it left off. In Python I've tried to create a simplified model of the ADC response from the datasheet. If that model is correct then https://acooke.org/img/pico-model.png shows one of these places (input analog voltage is the x axis; ADC output is the y axis). Reading through the MTM ComputerCard.h code at https://github.com/TomWhitwell/Workshop_Computer/blob/main/Demonstrations%2BHelloWorlds/PicoSDK/ComputerCard/ComputerCard.h I noticed a fix for this (round line 527). (I should say here that the ComputerCard.h library is awesome and has taught me a huge amount about the pico - huge thanks to Chris Johnson). I'll copy the code here: // Attempted compensation of ADC DNL errors. Not really tested. uint16_t adc512=ADC_Buffer[cpuPhase][3]+512; if (!(adc512 % 0x01FF)) ADC_Buffer[cpuPhase][3] += 4; ADC_Buffer[cpuPhase][3] += (adc512>>10) << 3; The correction has two important parts. The first is if (!(adc512 % 0x01FF)) ADC_Buffer[cpuPhase][3] += 4; which is targeting the spikes in the DNL plot in the datasheet (see above). This is an attempt to shift the "stuck" values into the middle of the range, although I don't understand why the value 0x1FF is used here - I think that would be the distance between the DNL peaks, which appears to be 0x200. The second, more significant part, is ADC_Buffer[cpuPhase][3] += (adc512>>10) << 3; which is a really cool way of adding in the "zig-zag" offset that appears in the data. It's picking off the topmost bits of the ADC value as needed. If that's still not clear and you're curious, play with my code below - plot the values when removed and it becomes pretty clear. Anyway, I started experimenting myself and found two more fixes. One corrects an offset of a few bits over part of the range, and the other simply rescales back to the 0-4095 range (using the "standard" trick of representing a fraction as an integer multiplication plus a shift / division of a power of 2). So "my" correction (the best part of which is taken directly from the ComputerCard.h code above), in Python, is: def me_correcn(a): b = a + (((a + 0x200) >> 10) << 3) if (a & 0x600) and not (a & 0x800): b += 2 if (a + 0x200) % 0x400 == 0: b -= 4 return (520222 * b) >> 19 The expected errors of the two corrections are plotted in https://acooke.org/img/pico-error.png and while "my" correction looks nicer I am not sure if it works, yet, or is "worth it" in terms of computational cost. So I will push on and try to get some code working. For now I am simply putting this out there. Andrew PS There was a little extra background given by Chris in the MTM Discord. I haven't followed up there yet because I don't yet have running code and I'm not so confident this is correct... (amongst other things, I'm worried about an off-by-one error in my implementation of DNL and INL) PPS Almost forgot, here's my Python code (I use gnuplot for plots): #!/usr/bin/python3 from os.path import exists from os import remove from functools import cache # guessed from plot (within 0.25?) # +ve values from DNL, -ve from INL # -ve sample number inferred from pattern (might be ignoring step near 2048) #DNL_OBS = {512: 9.0, 1536: 7.25, 2048: -3.0, 2560: 7.5, 3072: -1.0, 3584: 8.0} # but for monotonic conversion DNL cannot be less than -1 so presumably it's more like DNL_OBS = {512: 9.0, 1536: 7.25, 2047: -1.0, 2048: -1.0, 2049: -1.0, 2560: 7.5, 3072: -1.0, 3584: 8.0} # (which might be visible in the DNL plot in the data sheet) # (i'm also ignoring something at 511 in the DNL plot that may be an aliasing issue in the plot itself?) # i find it easier to think of bin widths with expected value of 1 (these are non-negative) WID_OBS = {k: v+1 for k, v in DNL_OBS.items()} # assume others are equal in width and the total width is given WID_OTHER = (4096 - sum(WID_OBS.values() )) / (4096 - len(DNL_OBS)) # i'm using indices from 0 which may be wrong? # given an analog value, calculate the measured value by the dac # from https://www.allaboutcircuits.com/technical-articles/understanding-analog-to-digital-converter-differential-nonlinearity-dnl-error/ # (esp figure 1 and the text below) index 1 corresponds to an output of 1 @cache def model_resp(a): d = 0 a -= WID_OTHER / 2 # if a is less than 1/2 a typical gap (or 1) then d is 0 while a > 0: d += 1 # move to next bin if d in WID_OBS: a -= WID_OBS[d] else: a -= WID_OTHER return d # plot a function to a file def plot(fn, path): if exists(path): remove(path) with open(path, 'w') as out: for x in range(4096): print(x, fn(x), file=out) print(f"output in {path}") # given a response, calculate the error def resp_to_err(resp, scale=1): if scale != 1: print('scale', scale) @cache def err(x): return resp(x) - x * scale return err # the correction in ComputerCard.h def cc_correcn(x): # uint16_t adc512=ADC_Buffer[cpuPhase][3]+512; adc512 = x + 512 # if (!(adc512 % 0x01FF)) ADC_Buffer[cpuPhase][3] += 4; if (adc512 % 0x01ff) == 0: x += 4 # ADC_Buffer[cpuPhase][3] += (adc512>>10) << 3; x += (adc512>>10) << 3 return x def apply(resp, correcn): def f(x): return correcn(resp(x)) return f plot(model_resp, "/tmp/model_resp") model_err = resp_to_err(model_resp) plot(model_err, "/tmp/model_err") cc_corrected = apply(model_resp, cc_correcn) plot(cc_corrected, "/tmp/cc_corrected") cc_err = resp_to_err(cc_corrected) plot(cc_err, "/tmp/cc_err") cc_err_scl = resp_to_err(cc_corrected, scale=cc_corrected(4095)/4095) plot(cc_err_scl, "/tmp/cc_err_scl") k = 1 << 19 # errors (in model) at 512 1536 (2048) 2560 3584 # diffs 1024 1024 1024 # scale inside 32bit (value is about 12 bits) def me_correcn(a): global k b = a + (((a + 0x200) >> 10) << 3) # if 512 < a < 2048: if (a & 0x600) and not (a & 0x800): b += 2 if (a + 0x200) % 0x400 == 0: b -= 4 return (k * b) >> 19 k = int(4095 * (1 << 19) / me_correcn(4095)) print(k) # 520222 me_corrected = apply(model_resp, me_correcn) plot(me_corrected, "/tmp/me_corrected") me_err = resp_to_err(me_corrected) plot(me_err, "/tmp/me_err")
Permalink | Comment on this post
For comments, see relevant pages (permalinks).
From: andrew cooke <andrew@...>
Date: Tue, 1 Jul 2025 15:27:44 -0400
I am writing some (audio) synthesis code for a CPU without fast division. Internally, amplitude is described with int16_t, but for some processes (eg wavefolding) it's useful to switch to floats. Without fast division this switch could be expensive. So I started to prematurely optimize... I realised that one way to convert between the two was to directly write to the mantissa part of an IEEE float - the float then "automatically" has the correct value without any explicit conversion. The only tricky technical details seemed to be handling the hidden bit and getting the exponent correct (avoiding denormalized values). But I ended up spending too much time on the details of type punning (that C trick of writing and reading from a union using different types). First, it turns out that type punning is not supported in C++, but seems to work in g++ (and C++23 has start_lifetime_as which can, I think, be trivially used to replace the type punning in my final code below). Second, the code at https://stackoverflow.com/a/15685301 DOES NOT WORK. Maybe it works in C - I don't know, I haven't tried it. But in C++ it fails. The reason is described at https://en.cppreference.com/w/cpp/language/bit_field.html - second example, with the comment "6 bits for b2 - doesn't fit into the 1st byte => starts a 2nd". (If you have no idea what I'm talking about https://en.wikipedia.org/wiki/IEEE_754 might help). So you end up having a union of a float with an uint32_t and doing the separation into the different components manually. And that does work! Although I still have no idea if it's faster that division. Here's the code. header: class IEEEFloat { public: IEEEFloat(double f); IEEEFloat(float f); IEEEFloat(int v); IEEEFloat(int16_t v); IEEEFloat(uint32_t m, uint32_t e, uint32_t s); float f(); uint32_t m(); uint32_t e(); uint32_t s(); int16_t sample(); void dump(std::ostream& c); private: const uint32_t hidden = 1 << 23; const uint32_t mask = hidden - 1; typedef union { float f; uint32_t u; } float_cast; float_cast fc; }; float sample2float(int16_t s); int16_t float2sample(float f); and implementation: IEEEFloat::IEEEFloat(double v) : IEEEFloat(static_cast<float>(v)) {}; IEEEFloat::IEEEFloat(float v) : fc({.f=v}) {}; IEEEFloat::IEEEFloat(uint32_t m, uint32_t e, uint32_t s) : fc({.u=0}) { fc.u = ((s & 1) << 31) | (e & 255) << 23 | (m & mask); } IEEEFloat::IEEEFloat(int v) : IEEEFloat(static_cast<int16_t>(v)) {}; IEEEFloat::IEEEFloat(int16_t v) : fc({.u=0}) { if (v != 0) { uint32_t s = static_cast<uint32_t>(v < 0) << 31; uint32_t e = 127; uint32_t m = static_cast<uint32_t>(abs(v)) << 8; while (! (m & hidden)) { m = m << 1; e--; } fc.u = s | (e << 23) | (m & mask); } } float IEEEFloat::f() { return fc.f; } uint32_t IEEEFloat::s() { return (fc.u >> 31) & 1; } uint32_t IEEEFloat::e() { return (fc.u >> 23) & 255; } uint32_t IEEEFloat::m() { return fc.u & mask; } int16_t IEEEFloat::sample() { if (e()) { int16_t v = static_cast<int16_t>((m() | hidden) >> (8 + 127 - e())); if (s()) v = -v; return v; } else { return 0; } } void IEEEFloat::dump(std::ostream& c) { c << fc.f << " (" << std::hex << m() << ", " << std::dec << e() << ", " << s() << ")" << std::endl; } float sample2float(int16_t s) { return IEEEFloat(s).f(); } int16_t float2sample(float f) { return IEEEFloat(std::max(-0.999969f, std::min(0.999969f, f))).sample(); } TEST_CASE("IEEEFloat") { CHECK(sample2float(sample_max) == doctest::Approx(1).epsilon(0.001)); CHECK(sample2float(sample_max/2) == doctest::Approx(0.5).epsilon(0.001)); CHECK(sample2float(0) == doctest::Approx(0).epsilon(0.001)); CHECK(sample2float(sample_min/2) == doctest::Approx(-0.5).epsilon(0.001)); CHECK(sample2float(sample_min) == doctest::Approx(-1).epsilon(0.001)); CHECK(float2sample(1.0) == doctest::Approx(sample_max).epsilon(0.001)); CHECK(float2sample(0.5) == doctest::Approx(sample_max/2).epsilon(0.001)); CHECK(float2sample(0.0) == doctest::Approx(0).epsilon(0.001)); CHECK(float2sample(-0.5) == doctest::Approx(sample_min/2).epsilon(0.001)); CHECK(float2sample(-1.0) == doctest::Approx(sample_min).epsilon(0.001)); for (int32_t s = sample_min; s <= sample_max; s += 1234) { CHECK(float2sample(sample2float(s)) == doctest::Approx(s).epsilon(0.001)); } for (float f = -1; f <= 1; f += 0.123) { CHECK(sample2float(float2sample(f)) == doctest::Approx(f).epsilon(0.001)); } } where sample_max and sample_min are 32767 and -32767 respectively. Andrew
From: andrew cooke <andrew@...>
Date: Thu, 26 Jun 2025 18:11:21 -0400
I've just got "hello world" working on the Music Thing Modular (MTM).
Here are a few notes:
- I didn't really follow anyone's instructions or project layout,
which in retrospect would have made things simpler.
- Instead, I started writing the code I wanted to deploy long before I
got the machine. I wrote in emacs and called g++ via a shell script
to compile. This worked fine for developing my small project, but I
just saw CLion is free for non-commercial use, so will probably
switch to that at some point.
- When I had the machine I realised I needed to do a fair amount of
work making it "uploadable": I needed to move to CMake, integrate
with the RPi pico SDK, and get cross-compilation working.
- I run Fedora on my laptop and a quick google suggested
cross-compiling on that wasn't great. So I installed Debian testing
on a VM (Debian is the basis of the RPi linux and seems to have lots
of support). What follows is therefore for Debian.
- I moved my project to CMake, which meant splitting into src and
include directories, and adding the following CMakeLists.txt:
$ cat CMakeLists.txt
cmake_minimum_required(VERSION 3.13)
#set(PICO_BOARD mtm_computer_16mb CACHE STRING "Board type")
set(PICO_SDK_FETCH_FROM_GIT on)
include(pico_sdk_import.cmake)
project(
cosas
VERSION 0.0
DESCRIPTION "just trying to get cmake working"
LANGUAGES CXX C) # C for sdk - https://stackoverflow.com/a/74591212
include(FetchContent)
FetchContent_Declare(workshop-computer
GIT_REPOSITORY https://github.com/TomWhitwell/Workshop_Computer.git
GIT_TAG main)
FetchContent_MakeAvailable(workshop-computer)
pico_sdk_init()
add_subdirectory(src)
set(CMAKE_EXPORT_COMPILE_COMMANDS ON)
set(CMAKE_CXX_EXTENSIONS OFF)
set(DOCTEST_CONFIG_DISABLE ON)
add_executable(cosas hello-world.cpp)
target_compile_features(cosas PRIVATE cxx_std_20)
target_compile_definitions(cosas PRIVATE DOCTEST_CONFIG_DISABLE)
target_link_libraries(cosas PRIVATE cosas_lib pico_stdlib)
pico_add_extra_outputs(cosas) # generate uf2
pico_enable_stdio_usb(cosas 1) # allow serial over usb
(Note that this includes some stuff I am unsure about, like the
WorkshopComputer repo - I assume I will need that later).
- Given that, in the same directory this creates the environment:
$ cat install.sh
#!/bin/bash
cd "$(dirname "${BASH_SOURCE[0]}")"
sudo apt install cmake gcc-arm-none-eabi libnewlib-arm-none-eabi libstdc++-arm-none-eabi-newlib g++
if [ ! -e pico_sdk_import.cmake ]; then
wget -L https://raw.github.com/raspberrypi/pico-sdk/master/external/pico_sdk_import.cmake
fi
mkdir -p build
pushd build > /dev/null
cmake ..
- And then "cd build; cmake --build" builds the code.
- This small hello world program doesn't actually use anything I've
written but ddoes test that deploy works:
$ cat hello-world.cpp
#include <stdio.h>
#include "pico/stdlib.h"
int main() {
stdio_init_all();
while (true) {
printf("Hello, world!\n");
sleep_ms(1000);
}
return 0;
}
- Running cmake (above) creates a uf2 file that I can upload tp the
MTM by following the instructions on their site (basically hold the
hiddent button down, tap the normal button, and then copy the uf2
file to the upload diretcory.
- Restarting everything, "cat /dev/ttyACM0" shows the hello world
message.
There are lots of details missing (feel free to ask, although I have a
memory like a sieve) - this is more to say that it is possible and to
encourage others.
Now I need to actually deploy the code I have...
Andrew
From: andrew cooke <andrew@...>
Date: Thu, 10 Apr 2025 19:36:05 -0400
i bought a cycling mirror (the "take a look" compact model that is sold on amazon) and tried it today. here are my first impressions (i am trying to order them from specific to general): - it's very well made for something so light and seemingly delicate. the mount on my glasses was secure, the adjustments easy, nothing moved out of adjustment (even on a road bike on santiago's bumpy roads), the mirror was clear and undistorted, and - most impressive of all - it was absolutely solid. no wobbling or shaking. - i use prescription glasses - i cycle in the same glasses i use all day. the mirror mounted on the left arm (here we ride on the right) and takes up the top left corner of the glasses frame that i see when i look out of left eye. in other words, it couldn't be higher or further outboard without being blocked by the frame or out of focus (i am short sighted). - when i cycle there's not a single position (angle) that i hold my head at. when i am more tired, or going faster, my head is lower. when paying attention to my environment, or climbing, my head is higher. this means that there is not one "perfect" adjustment for the mirror (which is flat, not convex): i needed to choose the head position (angle) at which i would adjust the mirror for the best view. - even at this optimum position i cannot see directly behind me. my cheek/shoulder is in the way. to see directly behind me i need to move my head slightly (look slightly to the left). - and even with my head turned, i cannot see the road if it curves away to my right (conversely, if the road curves away to the left i don't need to turn my head). so on winding (mountain) roads it is useful maybe 2/3 of the time. - the mirror is only visible in my left eye (obviously). sometimes that doesn't seem to matter - my brain switches to using just that eye if i want to look behind me - but sometimes it does, and it is hard to focus / understand without closing the right eye. this seems to depend to some extent on the ambient lighting. - the mirror blocks my left eye from looking in that direction (again, obviously). this can be important at junctions since it makes it harder to see traffic coming from the left. sometimes my brain switches to the right eye and there's no real issue, but sometimes it doesn't. again, it seems to be lighting dependent. - (if you have visual migraines) the mirror feels annoying like a visual migraine, in that there's something in your field of view that seems "wrong". after a three hour ride i was starting to feel the hint of a headache from this. - i suspect the three issues immediately above will all improve with practice. - perhaps because of the need to angle my head i didn't feel like the mirror was an improvement over my ears. in fact, my ears are better, in that they can hear cars round corners. and one of the things i learnt was that my ears are pretty damn accurate - i would hear something, look in the mirror to check, and get confirmation of vehicle type and position / distance. - on the other hand, on descents, or with headwind, when there's a lot of wind noise in my ears, the mirror did feel more useful. in that sense it complements, rather than replacing, hearing. - the moments when i was surprised by something in the mirror were when vehicles i had not heard or seen started to pass me. they appeared in the mirror just before they appear in peripheral vision (this did not seem to be particularly useful information). - it was kinda cool to see cars drop away behind me when descending quickly. - i was self-conscious about using the mirror, but in practice i don't think anyone much noticed. it reminded me of how i felt (many years ago) when i first used lycra - very self-concious, but noone else cared. also, despite what i've seen in some online images, the back of the mirror is a neutral grey. - i still look behind me before doing anything particularly risky. the mirror doesn't really replace that. maybe it would with more practice? - my overall reaction to the mirror is simiar to how i expect i'd feel about varia: it provides a little extra info, but it's not really useful / actionable. and they're both kinda nerdy. - the one place i can think of where the mirror might be critical is a fast right fork (where i ride straight on / left). after a near miss there last week i am considering simply stopping until things are clear. i will ride there on my next ride - maybe the mirror will mean stopping is not necessary? - the main conclusion from all this - for me - was that, above all, i *really* rely on car drivers not killing me. i don't see a way round this - the mirror doesn't change things much. - my second conclusion is that i should get some of those "cat ears" to reduce wind noise, given how useful my ears are. and i bet they are less geeky to wear (they don't *look* like cat ears...) andrew
From: andrew cooke <andrew@...>
Date: Fri, 21 Feb 2025 16:03:31 -0300
Loved this and wanted to record it here in case it's deleted later. Also, I need to sort out this place and get rid of all the spam, I know. https://www.reddit.com/r/Professors/comments/1iuqq6y/what_is_the_line_between_paranoia_and_preparedness/me0ejh0/ Credit to DerProfessor https://www.reddit.com/user/DerProfessor [In response to an acacdemic worrying about the future] Honestly, I would say--don't worry about it. I myself am not going to adjust anything one single iota. In part, because staying the same is, effectively, resistance. I am a historian of Germany, including of the Third Reich (though it's not my specific area of research). I know a great deal about how the Nazis solidified power 1933-1934. This is not that moment. One thing that has been consistent about Trump is that he bluffs on everything. Everything. This has been his standard mode-of-operation his whole life, from being a real-estate conman to posing as a fascist strongman. His posing and bluffing has gotten him what he wants a lot of the time. But equally, it is often hot air when he is ignored. The key word here is posing. Neither he nor the Republicans have mechanical structures (police, informants, allies in the academy, mass movement) to ever "see" what you are doing, let alone impact you as an individual professor. Consider: what levers does he have? When you say "when they will come for us"... who is they? And how will "they" even know who you are? Let us imagine that, over the next two years, an office is set up somewhere, to collect syllabi and thereby try to police teaching. How would the office be set up? (especially when the Dept of Education is being dismantled?) Who would be hired to work there? How would they "demand" the syllabi? If your university already posts them publicly, how would they collect them? There are millions of classes taught. They'd need to hire thousands just to read the ones that AI flags for words like "race". Then, what would be the mechanism for enforcement? Would this department call up your local police department and say, "We see that Professor Fit_Inside2339 at the University of Innuendo is teaching a class on race and ethnic relations... we need you to go arrest him." Any police officer, even a dyed-in-the-wool Trumpy, would laugh in their face. You're safe. You're fine. The Nazis could terrorize professors because 40% of professors were themselves Nazi supporters. That is crucial. Do you have a single colleague who is a Trump supporter? Even one? (The redneck dumbasses in their lifted trucks don't even know where the university is, let alone your classroom.) The Nazis also had the Gestapo. But recent literature reveals how incredibly ineffectual the Gestapo was on its own. They relied entirely on denunciations, they were reactive only. Who would denounce you? We ALL hate that orange motherfucker. No one is going to go running to denounce you as Unamerican... and even if you got a politicized student in your class who wanted to, who would this self-destructive student denounce you to? There's no infrastructure of oppression. Trump has no Gestapo. He has no control over police. He has no supporters in the academy. MOST importantly, he has no mass movement. (He has a bunch of passive, flag-waving supporters. that's different. that's just normal politics.) The one area that he does have control over is ICE/immigration structures, which already exist, and are already staffed with people predisposed to obey Trump's orders, legal or not. So, people who are undocumented are, indeed, facing a serious personal threat. Those folks are in trouble (and they therefore need our help and protection). But you're fine. Trump's "power" vis-a-vis academia is twofold: 1) to bluster loud enough, and play-act the fascist enough, so that people (like you and me) comply preemptively. THAT's not gonna happen. (unless you let it.) And 2) to disrupt money flowing to Universities, to try to pressure your Provost/Dean etc. into become stooges to force faculty to comply. Honestly, I don't think that's going to happen either. Sure, maybe a particularly craven Dean will come to your department and say, "look, I support you, but you need to retitle your classes so we can get our NIH grants back." And yes, that will be "complying". I honestly hope that doesn't happen. But if it does... so what? You retitle "Race in American Politics" to "Varieties of Identities in American Politics"... teach the same course... and then savagely mock that cowardly dean behind his back. (and remember his cowardice in the future.) There will be some rough times, don't get me wrong. For instance, there will be NO more Federal grants for your type of research for the foreseeable future. But your teaching? You'll be fine. I'll be fine. And the more we just keep doing what we've been doing all along, the "finer" we ALL will be! In solidarity.
From: andrew cooke <andrew@...>
Date: Thu, 25 Jan 2024 16:43:27 -0300
https://en.wikipedia.org/wiki/Unexpected_hanging_paradox describes a paradox I've heard various times that has always frustrated me. A discussion somewhere (reddit?) pointed to https://www.ams.org/notices/201011/rtx101101454p.pdf which is really interesting - in short their argument is that it assumes consistency in the theory in which it is dervied, coming up against Godel's second theorem. Andrew
From: andrew cooke <andrew@...>
Date: Tue, 17 Oct 2023 21:07:36 -0300
https://www.reddit.com/r/literature/comments/17a7e1o/literary_superstars_of_today/ Andrew
From: andrew cooke <andrew@...>
Date: Fri, 29 Sep 2023 12:54:40 -0300
I have finally understood a problem that has been worrying me for a long time. The key information is here - https://dba.stackexchange.com/questions/170860 In my case I have tables that look like: publisher | rowid | other data ------------------------------ puba | 1 | ... puba | 2 | ... puba | 3 | ... pubb | 1 | ... pubb | 2 | ... where: - there is a composite primary key (publisher, rowid) - the number of distinct publishers is small - the total number of entries is large And the particular problem I had was in the query: select publisher, max(timestamp) from table group by publisher; where timestamp is part of "other data". This query was slow and NOT using an index on (timestamp, publisher) (and the problem persists if the order in the index is swapped). This was a big surprise, because the index seems perfect for the job - it has ordered timestamps "grouped by" publisher (in a sense). The problem is that Postgres does not exploit the knowledge that there are only a few publishers. So it decides to do a full scan to find all publishers (simplifying a little). Since my publishers were actually listed in the publisher table the following query was much (100x) quicker: select p.publisher, (select max(t.timestamp) from table as t where t.publisher = p.publisher) from publisher as p; because it forces Postgres to look at each publisher in turn (instead of scanning many many duplicates). An extra detail is that I had to pull a more complex calculation based on the timestamp into an outer query so that the "max" was clear enough for the index to be used). The final query was with x as (select p.publisher as publisher, (select max(t.timestamp) as timestamp from table as t where t.publisher = p.publisher) from publisher as p) select publisher, extract (epoch from (now() - timestamp)) from x; to give the number of seconds since the latest timestamp. Andrew
From: andrew cooke <andrew@...>
Date: Wed, 6 Sep 2023 08:04:55 -0300
I want my computer to hibernate (or even to power off), but also to
wake automatically to check for email. To do this I:
1 - configure Gnome to hibernate after some period (eg 1 hour)
2 - add the following cronjob:
30 * * * * sudo rtcwake -u -m no -t `date -d 'tomorrow 00:00' '+\%s'` >& /dev/null
which at half-past every hour sets an alarm to wake the computer
at midnight.
This means that at midnight the computer starts and runs for an hour.
During that time, the alarm is set for the next day, then the computer
hibernates.
In this way the computer cycles every 24 hours (this starts even from
soft power off).
Obviously you could do something similar with smaller intervals if you
wanted, as long as you remember that only one alarm can be set at any
one time.
Andrew
From: andrew cooke <andrew@...>
Date: Tue, 22 Aug 2023 11:02:26 -0400
In theory go (golang) has first class support in AWS CDK. In practice
there are often missing examples. Support for Aspects was particularly
poor, so here's a simple example.
This adds a permission boundary to all roles, so you don't have to do
it explicitly (and includes implicit roles). The ARN for the boundary
includes the account name which is read from the environment.
In examples for other languages there's an issue with "instanceof"
operators (or similar) and multiple javascript packages. The same
problem may exist here, so treat with care.
The code is very simple, once it's there...
Andrew
package main
import (
"os"
"github.com/aws/aws-cdk-go/awscdk/v2"
iam "github.com/aws/aws-cdk-go/awscdk/v2/awsiam"
"github.com/aws/aws-sdk-go-v2/aws"
"github.com/aws/constructs-go/constructs/v10"
)
func main() {
app = ...
env = ...
...
awscdk.Aspects_Of(app).Add(&AddPermissionsBoundary{Account: env.Account})
...
app.Synth(nil)
}
type AddPermissionsBoundary struct {
Account *string
}
func (this AddPermissionsBoundary) Visit(node constructs.IConstruct) {
role, ok := node.(iam.CfnRole)
if ok {
role.SetPermissionsBoundary(aws.String("arn:aws:iam::" + *this.Account + ":policy/my-boundary"))
} else {
// not a role - the aspect is applied to all nodes in the tree (visitor pattern)
}
}
From: andrew cooke <andrew@...>
Date: Fri, 18 Aug 2023 10:53:37 -0400
My old Shimano CX shoes started to separate from the sole (making unclipping difficult). The Adidas gravel shoes were on offer from 199.990 to 139.990 (60% off) and when I added an offer code I found via google I got them down to around 103.000 (CLP), which seemed like a reasonable price, so I bought a pair. Since they are only available online I neded to guess the size. I have two pairs of adidas trainers - size 10.5 and 10 US. Since I thought a cycling shoe should be a fairy snug fit I ordered size 10 and it seems fine. My feet are perhaps slightly wider than normal, and they are still comfortable (but don't want to be any smaller!). They are black with white stripes and they look awfully like football boots. The white stripe is a bit much for a cycling shoe IMHO, but that was the only choice in stock. I've just come back from a ride and they seem fine. The elastic strip to trap the laces could be higher, but works. They're the most comfortable to walk in cycling shoes that I've owned and the soles are deep enough to avoid "clicking" on ceramic floors. The sole seems very rigid (no hot spot, but I have never had problems with that). They're easy to clip in, but if you don't the "arch" area is very hard and slippy, so you can easily slide off the pedal. Some other reviews mentioned that they are not well ventilated. I was hoping that might mean that they were warm, but they didn't seem any warmer than my previous shoes. The "sock" is really just a collar round the ankle and doesn't cause any problems, but I wonder how stretchy it will stay after a few years of use. So far they seem fine, but I wouldn't have wanted to pay full price... Andrew
From: andrew cooke <andrew@...>
Date: Fri, 21 Jul 2023 21:49:51 -0400
https://newatlas.com/computers/human-brain-chip-ai/ Andrew
{kind=link}
{kind=link}